4.7 gem.
5659+ beoordelingen5659+ beoordelingen
Voor 16:00 besteld = dezelfde dag verzonden
14 dagen retour
NL
Particulier
Zakelijk

12/04/2026
Welke verschillende afstandssensoren zijn er?
Afstand meten lijkt simpel. Je richt een sensor op een object en je krijgt een getal terug. In de praktijk gaat het vaak mis. De ene sensor werkt perfect op je werkbank, maar faalt zodra je ’m in een behuizing zet. Of hij meet prima op een wit vlak, maar niet op zwart kunststof. Daarom is de belangrijkste vraag niet “welke sensor is het beste?”, maar: welke afstandssensor past bij jouw toepassing?
In dit artikel vergelijk ik de meest gebruikte technieken voor hobby, prototyping en kleine R&D-projecten: ultrasoon, IR (infrarood), ToF (Time-of-Flight) en LiDAR. Je krijgt een snelle keuzehulp, praktische toepassingen, valkuilen en voorbeelden uit ons assortiment.

Snelle keuzehulp (in 10 seconden)
Gebruik dit als startpunt. Zie het als een vuistregel, geen belofte. De echte uitkomst hangt af van je doeloppervlak, montage en omgeving.

Welke verschillende afstandssensoren zijn er?
Er zijn grofweg vier families die je in Arduino-, Raspberry Pi- en ESP-projecten het meest tegenkomt. Het verschil zit niet alleen in “hoe ze meten”, maar vooral in waar ze gevoelig voor zijn. Geluid reageert anders op materiaal en vorm dan licht. En licht reageert weer anders op zon, glans en transparantie. Als je dat eenmaal doorhebt, wordt kiezen ineens logisch.
Ultrasoon meet met geluidsgolven. De sensor stuurt een korte “ping” en luistert naar de echo. Dit is vaak de goedkoopste allround optie.
IR (infrarood) werkt met licht. Veel IR-afstandssensoren zijn ideaal voor korte afstanden en simpele detectie.
ToF (Time-of-Flight) meet de tijd die licht nodig heeft om heen en terug te gaan. Dat levert vaak een nettere, stabielere meting op korte afstand.
LiDAR is in de basis ook “ranging met licht”, maar wordt vaak gekozen als je verder wilt meten, sneller wilt sampelen, of gewoon strakkere data nodig hebt.



Praktische toepassingen per sensortype
Als je prototypet, wil je vooral snel iets werkends. Deze voorbeelden helpen om de techniek te koppelen aan echte projecten.
Ultrasoon zie je veel bij robot auto’s en obstakeldetectie. Je krijgt snel een afstandswaarde waarmee je kunt sturen: remmen, uitwijken of stoppen. Ook voor waterniveau of “hoe vol is deze bak?” werkt het vaak goed, zolang het oppervlak redelijk vlak is.
IR wordt vaak gekozen voor handdetectie (iets komt dichtbij) of als simpele eindschakelaar zonder mechanisch contact. Het is compact en snel inzetbaar in kleine behuizingen.
ToF is sterk voor positionering en meetopstellingen. Denk aan een onderdeel dat je langzaam verplaatst en waarvan je de afstand wilt loggen, of een mechanisme dat je netjes op een positie wilt laten stoppen.
LiDAR zie je terug in projecten waar je sneller wilt meten of verder wilt kijken. Bijvoorbeeld bij snellere robots, of bij eenvoudige “mapping”/scan-achtige toepassingen waar je veel metingen per seconde wilt.
Ultrasoon afstandsensor: betaalbare allrounder
Ultrasoon is populair omdat het simpel te begrijpen is en vaak goed genoeg werkt voor prototypes. Je krijgt een directe afstandswaarde zonder ingewikkelde optische effecten waar je meteen rekening mee moet houden. In de praktijk betekent dat: je kunt snel testen, snel itereren en je code eenvoudig houden.
Een typische toepassing is een robot die niet tegen een muur aan moet rijden. Daar is het niet erg als je meting een beetje schommelt. Je wilt vooral een betrouwbare indicatie: “er komt iets dichterbij”. Ultrasoon is daar vaak prima voor.
Wanneer werkt ultrasoon juist niet?

Ultrasoon wordt lastiger als je doel het geluid niet goed terugkaatst. Zachte materialen (stof, schuim) absorberen geluid. Een schuin oppervlak kaatst de echo weg. En smalle objecten kun je soms missen omdat de bundel niet genoeg terugkrijgt. Ook montage speelt mee: als je de sensor in een krappe behuizing zet, kunnen randen en uitsparingen extra reflecties veroorzaken. Dan krijg je metingen die soms ineens uitschieten.
Indicatieve prestaties
Ultrasoon is meestal bedoeld voor middellange afstanden en is vaak “goed genoeg” voor prototyping. De exacte nauwkeurigheid hangt sterk af van temperatuur, luchtstroming, montage en het doeloppervlak.
Producten uit ons assortiment: waarom kiezen en voor wie?

Ultrasoon afstand sensor HC-SR04: kies deze als je een klassieke, snelle instapper zoekt voor Arduino/ESP-projecten. Geschikt voor hobby en snelle proof-of-concepts.
Grove – Ultrasone Afstand Sensor: kies deze als je snel modulair wilt bouwen en liever niet alles los bedraadt. Geschikt voor prototyping en onderwijsachtige opstellingen.
Waterdichte ultrasoon afstandsensor: voor buiten en ruige omgevingen

Zodra je buiten meet, verandert het spel. Regen, condens, stof en vuil zijn geen randgevallen meer. Dan is een waterdichte ultrasoon sensor vaak de meest pragmatische keuze.
Buitenprojecten starten vaak als hobby (“ik wil het waterniveau meten”), maar eindigen snel als iets dat weken of maanden moet blijven werken. Dan wil je niet dat je sensor het opgeeft door vocht of corrosie. Waterdicht betekent niet alleen “kan tegen regen”, maar vooral: je haalt een grote bron van onvoorspelbaarheid uit je prototype.
Wanneer kies je waterdicht?
Als je project buiten staat, in een vochtige ruimte hangt, of als je verwacht dat er vuil en spetters bij komen, is waterdicht vaak de veiligste keuze.
Product uit ons assortiment: waarom kiezen en voor wie?
Waterdichte ultrasoon afstand sensor A02YYUW: kies deze als je betrouwbaarheid in de praktijk belangrijker vindt dan de laagste prijs. Geschikt voor buitenopstellingen, niveau-metingen en langdurige tests.
IR afstandsensor: simpel op korte afstand
IR-afstandssensoren zijn aantrekkelijk omdat ze compact zijn en vaak precies in dat praktische bereik vallen waar je veel prototypes bouwt: handafstand, kleine mechanica, eenvoudige detectie. Denk aan een klepje dat moet openen als er iets dichtbij komt, of een mechanisme dat een eindpositie moet herkennen.
IR is vaak ook prettig als je weinig ruimte hebt. Je hoeft geen grote “twee ogen” module te monteren zoals bij veel ultrasoon sensoren. Dat maakt IR handig in kleine behuizingen of in prototypes waar je snel iets netjes wilt wegwerken.
Wanneer werkt IR juist niet?

IR is optisch. Fel zonlicht kan je meting verstoren. Ook het oppervlak van je doel speelt mee. Glanzend, heel donker, of juist transparant materiaal kan een IR-sensor in de war brengen. Binnen is dit meestal goed te managen. Buiten kan het sneller frustrerend worden.
Indicatieve prestaties
IR-sensoren worden vaak gebruikt voor korte afstanden. De gemeten afstand kan per oppervlak en lichtsituatie verschillen. Zie het daarom eerder als een praktische detectie-oplossing dan als een “meetlat”.
Product uit ons assortiment: waarom kiezen en voor wie?
IR afstand sensor 10–80 cm: kies deze als je op korte afstand snel wilt detecteren of positioneren. Geschikt voor compacte prototypes en eenvoudige mechanica.

ToF afstandssensor (Time-of-Flight): nauwkeurig op korte afstand
ToF-sensoren zijn vaak de stap die je zet als je merkt dat je prototype serieuzer wordt. Je wilt niet alleen detecteren, maar echt meten. En je wilt dat de waarde stabiel is.
Een mooi voorbeeld is een testopstelling waarbij je een onderdeel langzaam verplaatst en je de afstand wilt loggen. Of een project waarbij je een motor aanstuurt en je wilt stoppen op een exacte positie. Dan is een rustige, consistente meting belangrijker dan “goedkoop en snel”.
Wanneer werkt ToF juist niet?

ToF is geen magie. Als je doel transparant is, heel reflecterend, of onder een lastige hoek staat, kun je rare resultaten krijgen. Montage en afscherming blijven belangrijk.
Indicatieve prestaties
ToF wordt vaak gekozen voor nette metingen op korte afstand. In veel toepassingen voelt het stabieler aan dan eenvoudige IR-oplossingen, maar de echte prestaties hangen af van je opstelling.
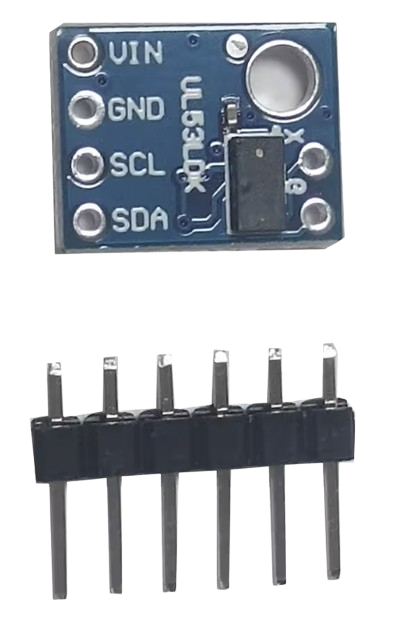
Product uit ons assortiment: waarom kiezen en voor wie?
GY-530 VL53L0X Time-of-Flight Laser afstandssensor: kies deze als je een compacte, nette afstandsmeting wilt voor prototyping, meetopstellingen of positionering.



LiDAR afstandssensor: sterk voor grotere afstanden en snellere metingen
LiDAR is interessant zodra je verder wilt meten of sneller wilt sampelen. Denk aan een robot die sneller rijdt, een meetopstelling die dynamisch is, of een prototype waar je minder tolerant bent voor ruis.
In kleine R&D-projecten zie je LiDAR ook als je al een paar iteraties verder bent. Je hebt dan vaak al geleerd waar je project gevoelig voor is. Als je merkt dat je met ultrasoon of IR steeds tegen dezelfde beperkingen aanloopt, kan LiDAR een logische stap zijn.
Wanneer werkt LiDAR juist niet?

LiDAR blijft afhankelijk van line-of-sight. Als je geen vrij zicht hebt op je doel, of als je doel in een lastige hoek staat, kun je meetproblemen krijgen. Ook hier geldt: montage en omgeving bepalen veel.
Indicatieve prestaties (zonder beloftes)
LiDAR wordt vaak gekozen als je verder wilt meten of sneller data wilt verzamelen. De exacte afstand en nauwkeurigheid verschillen per model en situatie.
Producten uit ons assortiment: waarom kiezen en voor wie?
TFmini‑I Industriële Lidar Afstandssensor: kies deze als je een robuste LiDAR-oplossing zoekt voor prototyping en kleine R&D.
TFmini Plus Laser Ranging Afstandssensor: kies deze als je LiDAR wilt, maar met een model dat vaak gekozen wordt voor snellere, strakkere metingen in projecten.
Binnen vs buiten: zonlicht, regen, stof en behuizing
Veel prototypes werken binnen. Daar heb je controle. Buiten heb je dat niet.
Binnen kun je IR en ToF vaak prima gebruiken, zeker als je de sensor afschermt en je doeloppervlak voorspelbaar is. Buiten krijg je te maken met zonlicht, reflecties, vocht en vuil. Dan wordt een waterdichte oplossing sneller de meest betrouwbare keuze.
Ook je behuizing is belangrijk. Een sensor “achter een raampje” klinkt netjes, maar transparant materiaal kan optische sensoren beïnvloeden. En een krappe montage kan bij ultrasoon reflecties veroorzaken. Als je meetwaarden raar zijn, is de behuizing vaak de eerste verdachte.
Veelgemaakte fouten bij afstand meten (en hoe je ze voorkomt)
De meeste problemen komen niet door de sensor zelf, maar door de situatie. Als je prototype “soms wel, soms niet” werkt, zit het vaak in één van deze punten.
De sensor staat niet haaks op het doel. Zet ’m zo recht mogelijk. Schuine doelen geven sneller missers.
Het doel is zacht of absorbeert. Ultrasoon houdt van harde vlakken. Stof en schuim zijn lastig.
Het doel is transparant of glanzend. Optische sensoren kunnen rare reflecties zien.
Te weinig vrije ruimte in de behuizing. Geef de sensor zicht en voorkom reflecties van randen.
Je verwacht te veel van één meting. Neem meerdere metingen en filter/average. Dat maakt je data direct rustiger.
Geavanceerde tips: combinaties die in prototypes vaak werken
Soms is één sensor niet genoeg. Zeker in R&D is het normaal dat je redundantie bouwt.
Ultrasoon + ToF is een sterke combinatie als je zowel “grof” als “net” wilt meten. Ultrasoon kan je snelle allround check zijn, ToF kan je precieze korte-afstand meting zijn.
IR + een fysieke switch werkt goed als je een eindpositie wilt herkennen. IR kan vroeg detecteren en de switch is je harde zekerheid.
LiDAR + encoder is interessant als je beweging meet én afstand wilt koppelen aan snelheid/positie. Dat is typisch zo’n stap als je van hobby naar serieuze prototyping groeit.
FAQ (veelgestelde vragen)
Wat is de beste afstandssensor voor Arduino?
Dat hangt af van je doel. Voor snelle prototypes is ultrasoon vaak de makkelijkste start. Wil je korte afstand netjes meten, dan is ToF vaak prettiger. Werk je vooral op korte afstand en wil je simpel detecteren, dan is IR vaak genoeg.
Werkt een afstandssensor ook buiten?
Soms wel, maar buiten is lastiger door zonlicht, vocht en vuil. In veel buitenprojecten is een waterdichte ultrasoon sensor de meest pragmatische keuze.
Wat is het verschil tussen ToF en LiDAR
Beide meten met licht, maar LiDAR wordt vaak gekozen als je verder wilt meten of sneller data wilt. ToF zie je juist veel bij compacte, nette metingen op korte afstand.
Werkt dit op een zwart of glanzend oppervlak?
Dat kan lastig zijn, vooral bij optische sensoren (IR/ToF/LiDAR). Glans, zwart en transparant materiaal kunnen reflecties of absorptie geven. Test daarom altijd met je echte doelmateriaal.
Conclusie: kies op omgeving en doel, niet op ‘de beste sensor’
Als je één ding meeneemt: kies je afstandssensor op omgeving (binnen/buiten, licht, vocht) en op doel (materiaal, hoek, grootte). Voor snelle prototypes is ultrasoon vaak het startpunt. Voor korte, nette metingen is ToF een sterke stap. Voor buiten is waterdicht vaak de slimste keuze. En als je verder of sneller moet: kijk naar LiDAR.
Wil je dat we even meekijken? Stuur je projectdetails (afstand, binnen/buiten, doelmateriaal en montage) en we adviseren welke sensor het meest logisch is om mee te starten.